


Sistemul de comandă al invertoarelor
A devenit o obișnuință utilizarea microcontrolerelor pentru comanda invertoarelor. Toshiba a produs microcontrolere în special pentru utilizarea în domeniul invertoarelor și a extins strategic gama de produse pentru a satisface cererea puternică a clienților. În acest articol, vom discuta despre modul în care funcționează sistemul de comandă al invertoarelor.
Ce este invertorul
Definiția clasică a invertorului spune că acesta face conversia curentului continuu în curent alternativ. După cum se știe, tensiunea în curent continuu are o valoare constantă, independentă de timp, în timp ce tensiunea alternativă depinde de timp. Unul dintre cele mai populare exemple pentru o sursă c.c. este bateria electrică, iar pentru c.a. tensiunea pe care o avem acasă, la 50 Hz.
Utilizarea invertoarelor este larg răspândită în diferite sisteme de conversie a energiei, controlul motoarelor (energie electrică în energie motrice) pentru sistemul de aer condiționat sau mașinile de spălat, mașini de gătit cu inducție (energie electrică în energie termică), convertoare de putere care transformă energia electrică produsă de panourile solare în energie electrică de curent alternativ sau sunt folosite ca stabilizatoare de tensiune.

Utilizarea invertoarelor
Cum funcționează invertorul
Sistemul de comandă al invertorului este compus din două circuite principale. Unul dintre acestea este „Generatorul undei originale” pentru tensiunea c.a., iar celălalt este „Generatorul c.a.” care produce o undă c.a. țintă. Generatorul undei originale produce o serie de impulsuri, ale căror înălțimi sunt identice, dar cu lățimile selectate de generator. Seria de impulsuri reprezintă „Unda originală” pentru unda țintă c.a. Lățimea fiecărui impuls este determinată de un calcul special care va fi detaliat mai jos.
Generatorul c.a. transformă semnalul original în semnal c.a. Acest circuit conține câteva perechi de comutatoare. Pentru a simplifica explicația, să presupunem că există doar o pereche de comutatoare în circuitul de decodificare. Una dintre bornele unui comutator este legată la sursa de tensiune c.c. (V+) iar o borna a celuilalt comutator este legată la potențialul pământului (masă). Celelalte borne ale ambelor comutatoare sunt conectate între ele, formând borna de ieșire a generatorului c.a.. Fiecare comutator este controlat prin modificarea undei semnalului original. Această configurație poate produce trei nivele de tensiune: nivelul tensiunii c.c. (V+), nivelul masei și un nivel intermediar între V+ și masă.
Explicația este dedicată doar celor două comutatoare, dar este de înțeles că mai multe comutatoare și un sistem de control mai sofisticat vor crea o undă c.a. mai complexă plecând de la nivelurile simple ale c.c. și ale masei.
De acum, vom discuta despre generatorul undei originale, deoarece acesta este scopul articolului.

Sistemul de control al invertorului
1. Semnalul sinusoidal
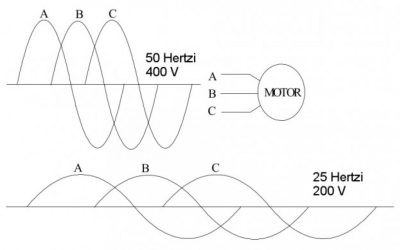
În multe cazuri, unda c.a. țintă va fi sinusoidală. De exemplu, un sistem de control al motorului va necesita o undă sinusoidală pentru a controla motorul, deoarece o undă sinusoidală ideală oferă cea mai silențioasă rotație și cel mai mic consum de energie. Un alt exemplu sunt convertoarele de frecvență de putere, care generează unda sinusoidală de 50 Hz pentru a livra energia electrică în rețeaua publică.
Acum vom discuta despre cum este produsă unda originală de către generator, care va fi apoi transformată într-o undă sinusoidală de către generatorul de c.a..

Unda sinusoidală
Nivelele maxime și minime ale generatorului de c.a. sunt +V și respectiv –V, iar amplitudinea este mai mică decât valoarea 2 x V.
Apoi, este utilizat un triunghi isoscel. Înălțimea triunghiului este 2 x V și se repetă de-a lungul axei orizontale (axa timpului), iar baza reprezintă un interval fix de timp. Unda sinusoidală este reprezentată pe grafic, având în fundal triunghiurile aliniate.

Sinusoidă și semnalul triunghiular sinusoidal
Comparând valorile triunghiului cu cele ale sinusoidei, va fi considerat 1 dacă sinusoida este mai mare decât triunghiul și 0 în caz contrar. Astfel, vor rezulta impulsuri secvențiale de o unitate, care reprezintă unda originală a sinusoidei.

Generarea undei originale S
Unda originală (Semnal S) arată că impulsurile mai largi apar la valorile mai mari ale sinusoidei. Pentru o mai bună înțelegere, dacă impulsurile ar fi modificate pentru a umple spațiul învecinat fără a schimba suprafața impulsului, se va contura forma unei sinusoide (Semnal Sa). Este ușor de înțeles că forma va fi cu atât mai apropiată de o sinusoida cu cât triunghiurile vor fi mai ascuțite (cu baza mai mică). Trebuie notat că semnalul Sa nu este o undă reală, ci una conceptuală.

Semnalul Sa modificat de unda originală S
Tehnologia generării unei unde precum unda originală, care este compusă din impulsuri cu înălțime constantă și lățime variabilă, se numește PWM (Pulse Width Modulation). Controlul invertorului se face prin tehnologia PWM.
2. Controlul prin feedback
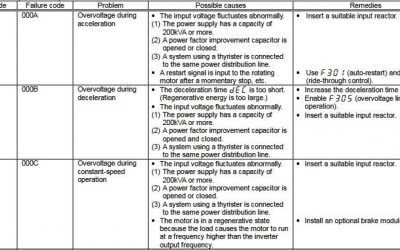
Baza funcționării sistemului de comandă al invertorului este: generatorul undei originale produce unda originală PWM, iar generatorul c.a. va produce o undă sinusoidală modificată de unda originală. În situația reală însă, aceasta nu este totul. Sistemul de control are un motor sau un alt dispozitiv conectat, adică o sarcină. Când sarcina este în funcțiune, va distorsiona unda sinusoidală de pe ieșirea generatorului c.a.. Amplitudinea undei sinusoidale poate descrește, faza se poate schimba ușor, sau frecvența poate fi instabilă, și așa mai departe. Sistemul trebuie să dispună de încă câteva funcții pentru a obține curba ideală a undei sinusoidale.
O funcție de monitorizare a undei pe ieșirea generatorului c.a. (care alimentează sarcina) este necesară. Apoi, semnalul monitorizat trebuie comparat cu forma ideală a undei. Ca rezultat, dacă amplitudinea semnalului monitorizat este mai mică, semnalul generatorului undei originale, impulsurile PWM, trebuie să fie mai largi, și viceversa. După repetarea acestui proces, unda generată este foarte apropiată de unda ideală.
O buclă precum cea de mai jos este cunoscută ca sistem de control cu feedback. Datorită acestui sistem, controlul prin inverter poate fi utilizat într-o varietate de sarcini.

Control prin feedback
3. Circuitele necesare pentru controlul invertorului
Sunt necesare un circuit de monitorizare pentru a monitoriza semnalul emis de generatorul a.c., un generator de semnal cu triunghiuri isoscele, un circuit pentru compararea semnalului monitorizat cu semnalul triunghiular (un generator de semnal S), un comparator al semnalului S al semnalului monitorizat cu semnalul S ideal al sinusoidei ideale, memorarea semnalului ideal S, generator PWM, și desigur generatorul a.c.
Circuitul de monitorizare al semnalului emis de generatorul a.c. este un convertor AD care convertește semnalul analogic monitorizat în valori digitale. Această conversie face mai ușoară compararea amplitudinii valorilor convertite cu valorile triunghiurilor isoscele (valori digitale).
Un circuit de contorizare este folosit la generarea triunghiurilor isoscele. Contorul trebuie să numere impulsurile cu un ceas de mare frecvență, urcă până la o valoare predefinită și descrește după atingerea acesteia. Acesta generează triunghiurile isoscele.
Compararea va fi făcută cu un calculator digital.
Semnalul S al curbei sinusoidale ideale este stocat în memorie.
Impulsurile PWM vor fi generate de un circuit special care este dedicat controlului unei serii de impulsuri PWM.

Circuitele de control ale invertorului
După cum se poate înțelege, aproape toate circuitele pentru funcția de control a invertorului sunt integrate într-un microcontroler.
Utilizarea unui microcontroler cu control PWM IP (Intellectual Property) este una dintre cele mai bune soluții pentru sistemul de comandă al invertorului.
Sursa: www.toshiba.semicon-storage.com
Gama de convertizoare de frecvență o găsiți aici: https://www.braistore.ro/convertizoare-de-frecventa








Leave a Reply