


Toshiba VFNC3. PID, controlul automat al proceselor
INTRODUCERE
Programarea PID poate fi folosita pentru controlul proceselor, pentru menținerea constantă a temperaturii, presiunii, debitului sau nivelului.
Controlul se face în buclă închisă, unde măsurarea în timp real a mărimii fizice variabile (temperatură, presiune, debit, nivel) a procesului controlat este transmisă convertizorului în mod continuu, pentru a se asigura obținerea valorii dorite.
În exemplul de mai jos, variatorul de turație este folosit pentru a controla viteza pompei și a menține presiunea constantă pe ieșirea pompei.
Pe măsură ce valvele în aval de pompă se deschid, presiunea în rețea va începe să scadă. Convertizorul simte printr-un semnal feedback 4-20 mA și accelerează pentru a crește presiunea la nivelul dorit.
Convertizorul va reduce turația pe măsură ce valvele se vor închide.
Rata cu care variatorul de turație va răspunde modificărilor presiunii (în cazul nostru) se poate ajusta utilizând trei parametri (amplificare proporțională, integrală și diferențială). Aceștia trebuie reglați pe teren.
EFECTUAREA LEGATURILOR
(comun P24)
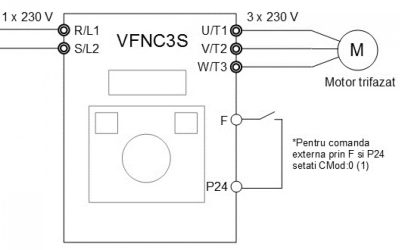
Schema de mai sus este pentru conectarea unui traductor de presiune 4-20 mA, alimentat din sursa externă convertizorului. În cazul utilizării unui traductor de curent cu 2 fire, acesta se va conecta la P24 (+) și VI (-).
PARAMETRIZARE
Informații generale
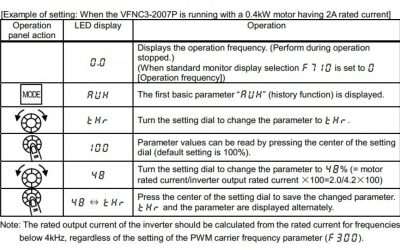
Pentru a intra sau ieși din meniu apasați MODE.
Pentru navigare în meniu sau pentru a schimba o valoare învârtiți de rotiță.
Pentru a seta o valoare apasați în centrul rotiței.
După apăsarea tastei MODE pe ecran este afișat AUH (primul dintre parametrii de bază).
În paranteză sunt trecute valorile predefinite.
Instrucțiunile sunt sub formă: Informații afișate pe ecran | Explicație.
Configurare logică pozitivă
Spre deosebire de alte convertizoare Toshiba, VFNC3 nu are un switch pentru configurarea logicii de functionare. Aceasta se poate schimba din parametrul F127:100, care pentru EU este configurat pe sursa.
Configurarea inițială
Set: EU | Alegerea regiunii si stabilirea automata a valorilor parametrilor de baza
Parametrizare pentru control PID
În paranteză sunt trecute valorile predefinite.
- Apăsați MODE
Folosiți rotița pentru a naviga și setați:
- CMod:0 (1) | Dacă faceți comandă prin blocul terminal.
Pentru comanda de pe panoul convertizorului, lăsați nemodificat.
- Alegerea modului de reglare a semnalului de referință (să nu se aleagă intrarea VI, FMod:0).
Dacă doriți să modificați valoarea de referință din rotița convertizorului, lăsați acest parametru nemodificat.
a) FMod:1 (2) | Butonul rotiță (apăsați în centru pentru a salva)
sau
b) FMod:2 (2) | Butonul rotiță (rămâne salvat chiar și dacă se întrerupe alimentarea)
c) FMod:3 (2) | RS485
d) FMod:5 (2) | Sus/jos din intrări logice
- F360:1 (0) | Activare control PID
Setați ACC (timp de accelerare 0-FH), dEC (timp decelerare) cu valorile potrivite sistemului.
Pentru a limita frecvența de ieșire, setați UL (limita superioară a frecvenței) și LL (limita inferioară a frecvenței)
- Alegerea tipului semnalului pentru semnalul feedback, de la traductor (VI să nu fie aleasă pentru semnalul de referință la FMod)
a) F109: 0 (0) – pentru semnal 0-10 V
sau
b) F109: 1 (0) – pentru semnal 0-20 mA; F201: 20 (0) – pentru semnal 4-20 mA
sau
c) F109: 3 (0) – pentru semnal (0 – 5 V)
Ajustarea intrării feedback
Dacă semnalul de intrare este prea mic, se poate modifica raportul între semnal și frecvența de ieșire utilizând:
F201, F202, F203, F204
Utilizând F359 se poate seta întârzierea intrării în funcțiune a PID, de exemplu după pornire. Convertizorul va ignora valoarea feedback pentru perioada aleasă cu F359.
Ajustarea PID
Reglarea modului în care convertizorul reacționează la schimbarea valorii feedback
Adică aceasta reglează cât de repede răspunde convertizorul la modificarea semnalului de feedback (ex.: schimbarea presiunii). Adică minimizează timpii de creștere și de stabilizare. Alegerea timpurilor potrivite o face utilizatorul conform cerințelor procesului.
Creșterea frecvenței de ieșire implică creșterea presiunii (în exemplul nostru)
- F362:0,3 (0,3) | Amplificare proporțională
- F363:0,2 (0,2) | Amplificare integrală [1/s]
- F366:0 (0) | Amplificare diferențială [s]
- F380:0 (0) | Selectarea caracteristicii PID înainte/înapoi, 0: înainte, adică frecvența va crește dacă valoarea de feedback scade sub valoarea de referință, și scade când valoarea feedback este peste valoarea de referință. Pentru ca sistemul să lucreze invers (ex.: răcire), setați F380:1: înapoi.
Graficele de mai jos descriu parametrii de ajustare PID.
Amplificarea proporțională
Acest grafic arată cum amplificarea proporțională (F362) influențează timpul rampei. O amplificare mai mare va descrește timpul rampei, dar o amplificare prea mare va crea o supracompensare care va putea genera oscilații.
Amplificarea integrală
Nu este neapărat o amplificare, ci mai degrabă un timp. Se reglează cu F363 și reprezintă timpul efectiv (secunde) necesar circuitului integral pentru a pleca de la zero la nivelul setat de ieșirea circuitului proporțional. De aceea este influențată de valoarea proporțională setată. O valoare ridicată a amplificării integrale reduce abaterea reziduală. O valoare prea mare poate cauza funcționare neuniformă.
Cu cât timpul setat este mai mic, cu atât efectul amplificării integrale va fi mai mare. Dacă aveți un sistem care nu ajunge niciodată la valoarea de referință, scădeți timpul circuitului integral.
Amplificare diferențială
Reglată din F366, este folosită rar, dar ajută la oprirea oscilațiilor în cazul variabilelor care se modifică lent (temperatura). Mărește viteza de răspuns la modificările rapide ale abaterilor.
Cu cât va fi mai mare timpul setat, cu atât va fi mai mare efectul circuitului diferențial.
Abateri – diferența dintre valoarea parametrului procesului și valoarea de feedback.
Stabilirea valorii de referință
Valoarea de referință este valoarea mărimii fizice a procesului (temperatură, presiune, debit, nivel) pe care trebuie să o mențină convertizorul. Reprezintă raportul dintre frecvența de comandă și frecvența maximă pe ieșire pe care convertizorul o folosește pentru a obține valoarea feedback pe care variatorul încearcă să o mențină. Parametrul FMod determină locul din care se va seta valoarea de referință. În cele mai multe aplicații se optează pentru utilizarea panoului convertizorului.
Pentru a calcula valoarea de referință este nevoie să se cunoască domeniul de lucru al traductorului.
Exemplu, presiune constantă
Domeniul traductorului: 4-20 mA
Domeniul de presiune al traductorului: 0-6 bari
Domeniul de lucru al convertizorului: 0-50 Hz
Valoarea dorită a presiunii: 4 bari
Valoarea de referință = (presiunea dorită / (presiunea la 20 mA – presiunea la 4 mA)) x 50 = (4 / (6 – 0)) x 50 = 33,33 Hz
Pentru acest exemplu, setați 33,33 Hz ca valoare de referință utilizând rotița de pe panou.
Pentru a afișa pe ecran o valoare care să corespundă procesului (temperatură, presiune), se poate utiliza parametrul:
F702, pentru multiplicarea frecvenței cu un factor definit de utilizator
Apăsați MODE până reveniți la ecranul de bază (0.0).
Oprirea automată în cazul funcționării la frecvență joasă
De exemplu, pompa se va opri după ce a funcționat timp de 3 secunde la frecvența de 17 Hz, și va reporni când frecvența comandată va fi 22 Hz:
LL: 17 Hz (0) | Limita inferioară a frecvenței
F391: 5 (0.2) | Convertizorul repornește (funcția auto-stop încetează) când
frecvența comandată va avea valoarea LL + F391 (22 Hz)
F256: 3 (0) | Timpul de funcționare la frecvența minimă stabilită cu LL, după
care convertizorul se oprește. Se alege valoarea dorită.
Dacă este ceva ce nu înțelegeți în acest proces, apăsați MODE de câteva ori pentru a reporni din ecranul AUH.
NOTE
Valori PID recomandate în funcție de utilizare
Debit:
P:0,3; I:0,6; D:0
Nivel, rapid:
P:1; I:8; D:0
Nivel, lent:
P:0,25; I:16; D:0
Presiune, rapid:
P:2; I:0,5; D:0
Presiune, lent:
P:1; I:2; D:0
Temperatura, rapid:
P:1; I:2; D:0
Temperatura, lent:
P:1; I:16; D:0,25
Temperatura, cuptor:
P:0,8; I:8; D:0,125
Viteza compresorului:
P:1; I:2; D:0
P – proporțional; I – integral; D – diferențial
Selectarea caracteristicii PID înainte/înapoi
Înainte, F380:0, adică frecvența va crește dacă valoarea de feedback scade sub valoarea de referință, și scade când valoarea feedback este peste valoarea de referință.
Pentru ca sistemul să lucreze invers (ex.: răcire), setați F380:1: înapoi.
Dacă viteza oferită de convertizor nu este cea setată, verificați toate legăturile și parametrizarea făcută. Asigurați-vă că F127:100 (sursa).
Dacă valoarea maximă a mărimii fizice a procesului depășește valoarea maximă de feedback (ex.: 20 mA), frecvența convertizorului nu va putea crește peste limita superioară, deci frecvența pe ieșire va rămâne constantă chiar dacă mărimea procesului va crește. Deci valoarea mărimii procesului trebuie să se încadreze în limitele semnalului de feedback.
Frecvența efectivă de ieșire este diferită de frecvența setată pentru controlul PID.
Pentru a reveni la setările din fabrică:
Setați parametrul tyP pe “13”, sau
Setați parametrul Set pe “0”
Pentru a verifica ultimii parametri modificați se utilizează funcția AUH. Aceasta afișează ultimii 5 parametri care au fost modificați.
Interpretarea caracterelor afisate pe ecran.
Aici găsiți convertizoarele Toshiba VFNC3.






Leave a Reply